
CANopen controller for independent metering control valves

CiA 408 defines the CANopen-based control interface for valves including device state management, control signals, and common device parameters. This article introduces CiA 408, describes a valve controller deployment, and discusses deployment with experiences from real-system projects.
CANopen is the most flexible and widely used system integration framework for generic machinery automation applications. There have been many CANopen valves in the market from the late 90’s, but the hydraulic part of such has been limited to the use of a single-spool only. The constrained offering has reduced spreading of the use of modern, distributed controls utilizing integrated valve controllers with standardized interface.
This article begins with a very brief introduction to the hydraulic valve structures, followed by an introduction of the CiA-408 device profile. Next, a review of the existing CiA-408 compliant valves and PLCs is provided. After the state-of-the-art, the controller deployment is described. The summary of the deployment with experiences from real system projects is provided and future enhancements listed in the discussion.
Flexible support for hydraulic structures
Hydraulic valves in machinery applications have typically been optimized for each purpose by variety of structural options, such as different sizes and kinds of main spools. Supplemental valves have been required to enable e.g. adjustable counter-pressure. The main reason for the use of such options is to reach the control accuracy, stability and response-time performance required by the applications. The traditional approach leads into simple valve structure in simple applications, but the complexity increases significantly along the increasing performance requirements. There exist also twin- and quad-spool valves in the market for the most demanding purposes, but such do not support standardized control interface and thus such are not drop-in compatible with the mainstream valves have been considered complex to use [1].
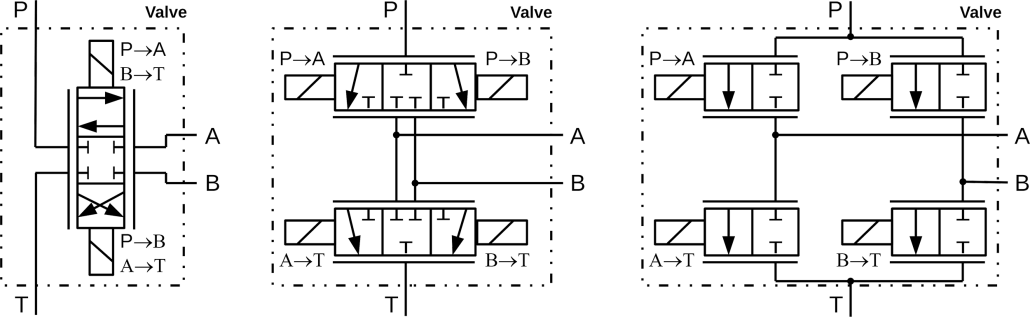
Figure 1: Examples of single- (left), twin- (middle) and quad-spool (right) valve structures
Figure 1 introduces different valve structures. Hydraulic interfaces are equal in all valve structures and the difference is in the control behavior. There are four so called control edges, supply pressure (P) to work port A and B, and from ports A and B to the tank (T). In a traditional single spool valve all edges are tightly coupled with each other, which limits the achievable behavior. In twin-spool valves, meter-in and meter-out may be independently controlled for both directions [2]. There are still constraints, e.g. by means of flow capacity. Each control edge is independent of the other in quad spool independent metering control valves [3]. Such provides excellent adaptability but the control of such has traditionally been left to the system integrators, which have typically considered the controls too complex and thus have not used such valves. This article presents a solution for that problem.
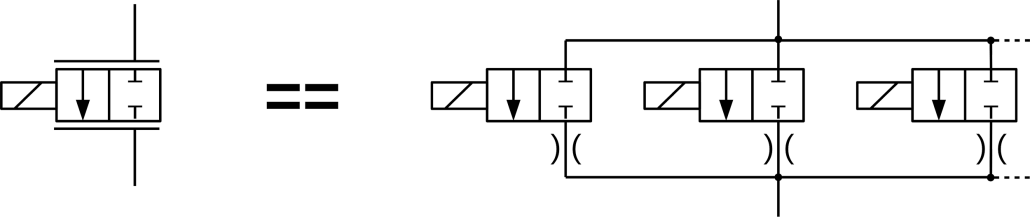
Figure 2: Proportional valve may be replaced with series of on/off valves
Another topic is, how to implement proportional behavior of a valve. Traditionally proportional valves were used, where valve opening is proportional to the coil current. There are many unwanted characteristics, why so-called digital valves have been introduced. Such consist of parallel connected on/off valve elements [4]. Main advantages are simple control and stable behavior, when compared with proportional valves. However, system integrators have considered control of many valve elements instead of one a problem. This article presents solution also for that problem.
Standardized valve control interface
The most commonly supported standardized control interface is defined field bus independently by VDMA [5] and mapping of it into CANopen is covered by CiA-408 device profile [6]. Those standards define the core control interface consisting of a device state management, control signals and the most common device parameters. A block diagram is shown in Figure 3. State management concentrates on a managed error reaction and recovery according to the requirements of machine directive. Harmonized control signals enable simple application development – the valve control interface does not depend on the valve supplier, model or version and the control applications may use always the same integration approach and signaling. Furthermore, harmonized set of key parameters ease significantly the management of adapting valves to operate in their target positions according to the system requirements. One of the most significant features is a possibility for integrated factory calibration. Such may be utilized so, that the valves are calibrated in the factory and may just be installed in the assembly lines. The drive currents versus spool positions of old fashioned analog valves without integrated controllers have always to be calibrated with the connected controllers after the assembly and service actions. Such decreases the assembly and service efficiency and makes the resulting accuracy dependent on the skills of the calibrating person, time and tools available.
Also, the design data management becomes easy and reliable according to the use of integrated controllers. Key parameters may be defined during the design phase and stored into the CANopen network project based on standardized files [7] [8] [9]. Such files can just be provided to assemble and service, where the target position specific parameters may just be stored to the valves. The use of such approach with proper tools is efficient and helps in avoiding the human mistakes.
Off-the-shelf CANopen valves
The use of the off-the-shelf valves supporting a standardized control interfaces simplifies and speeds up the designs significantly. The use of the device state machine improves the overall functional safety performance and leads into the use of a uniform approach for managed valve drives. As shown in Figure 3, control word and setpoints provide redundant signal paths for shutting off the valve in a case of emergency. When compared with the valves with coils only, network-equipped valves consist of integrated lowest level controls, which don’t need to be implemented and approved in the application SW project. Major advantages of such are the support of a control interface independent of the valve specific structure and integrated support for factory calibration of the valves.
Off-the-shelf controller platform
IEC 61131-3 compliant control application to provide flexible support of target HW [10]. The support for digital valves requires support for higher number of outputs than traditional single-spool valves. Thus, a typical mobile PLC is an attractive platform for independent meter controls. The use of the standardized programming languages makes it easy to intrinsically support for many alternative PLCs with different processing performance and number of outputs. Independence on the hardware is an excellent tool for coping with the potential hardware scalability, availability and obsolescence problems.
Independent meter control valve controller
Valve controller follows the standard CiA-408 compliant structure illustrated in Figure 3 [5] [6]. Device control consists of device state-machine taking care of managed start-up, error and error recovery behavior. It ensures that the valve operation will be intentionally enabled after power-up and that error recovery does not lead into an unintentional behavior. State machine is controlled by “control word” and its current state is available as “status word”.
Program control takes care of managing the control mode in use and mode dependent selection of setpoints. In a case of this implementation, open-loop spool position control is in use. Because of the valve structure flexibility, both flow and pressure setpoints are supported. They affect on meter-in and meter-out valves according to the flow direction.
Setpoint conditioning implements only setpoint enable based on the the device state machine. Open-loop setpoints represent spool openings between -100% and +100% for flow and between and 100% for pressure. Flow setpoint effects on meter-in control edge and pressure setpoint on meter-out control edge by taking care of the given flow direction.
Controller part implements the valve control behavior of the valve units according to the defined valve structure parameters. Each valve element may be a proportional valve or a “digital valve” – a set of parallel on/off valves [4]. The number of parallel valves may vary from 1 to 8, depending on the constraints set by the underlying hardware. The structure of each control edge may be defined independently of each other in order to provide maximum flexibility for the hydraulics. Controller also implements a configurable output mapping. It implements flexible mapping of each controller output into a corresponding output pin. Such enables flexible usage of the underlying hardware and support of practically any hardware supporting enough PWM- and on/off-outputs.
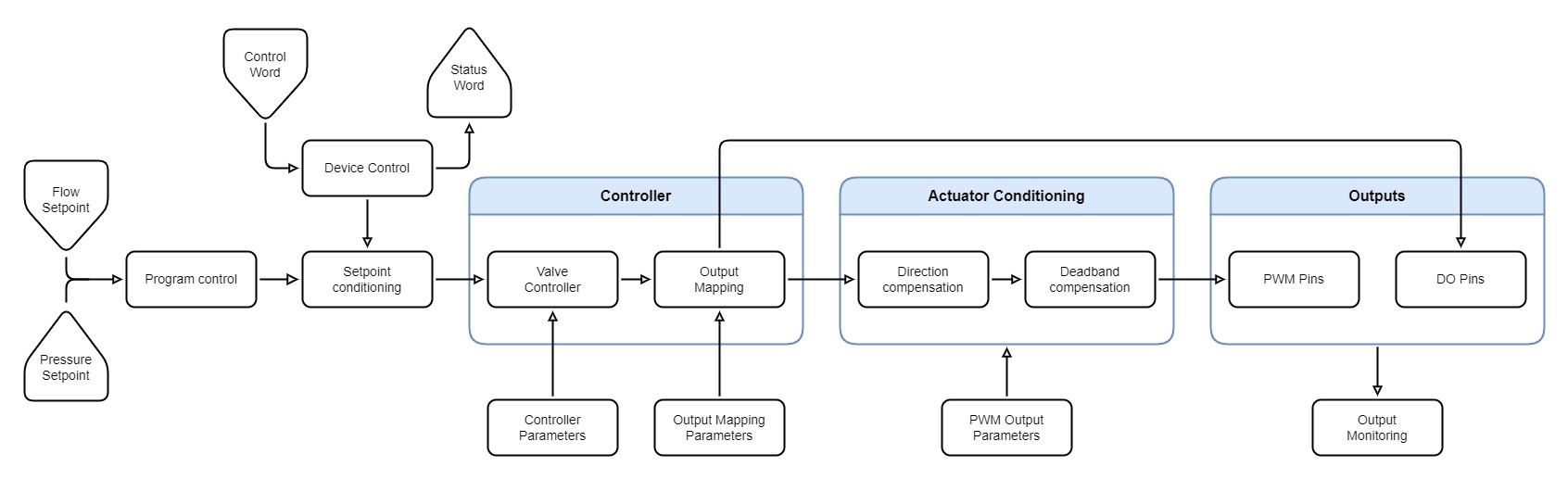
Figure 3: Valve controller block diagram based on CiA-408 device profile
Controller is followed by the controller output conditioning. On/off output signals are used directly. PWM-outputs shall support calibration of minimum and maximum output currents to drive the attached valve elements in an optimal way. Modulation frequency and dither settings are typically implemented by the platform runtime or hardware vendor specific libraries. Output status is provided to troubleshooting purposes.
Discussion
A CiA-408 compliant [5] [6] controller for independent metering control valves has been developed. It supports the device state-machine enabling well managed start-up, error reaction and recovery. Open-loop spool position control mode has been deployed for both flow and pressure. Device profile specific standard parameters have been used for device control, program control and controller output conditioning. Only the controller parameters are naturally product specific. Device profile compliance is important, because from the interface perspective the controller is drop-in interchangeable with the traditional single spool CANopen valves in the market. Such provides excellent opportunity to system integrators to solve their hydraulic control problems by selecting an optimal hydraulic part and commit into CiA-408 device profile specific control interface. As a result, any hydraulic function in a system may be controlled by using the same, standardized approach independently of the hydraulic valve structure.
The developed controller supports any combination of on/off or proportional valves. The only limitation is, that either a set of on/off valves, also known as a digital valve or a proportional valve shall be selected for a control edge, such cannot be mixed. It has already been evaluated in real system projects, how freely the hydraulic structure of a valve may be selected. It has also been evaluated, that the valve element configuration may be adjusted any time during a system development project without causing any additional problems. Vice versa, such ability for valve structure optimization improved the overall project efficiency. All changes were made without a need for changing system control application or system level parameters.
Configuration management is as easy as with any other CANopen device. Device integration interface with default values is described as a standard EDS-file, which is a proven mechanism to communicate the data from device supplier o he system integrator. The entire configuration may be managed as a DCF-file, from which it may be stored to the controller as an integral part of system assembly and service process [7] [8] [9].
A standard mobile PLC has been used as a hardware. Because the controller application has been developed by using IEC 61131-3 programming languages [10], it may be easily deployed into any mobile PLC supporting IEC 61131-3 programming and CANopen interface. Such enables easy HW adaptation to various valve configurations in a cost-efficient way. Such also minimizes availability and obsolescence risks of the hardware.
However, the controller deployment is far away from complete. The future development may include some setpoint conditioning features increasing the flexibility further. Also, a support for differential hydraulic connection and integrated axis controller are attractive future enhancements. Regarding the parameter objects, some improvement ideas to the future CiA-408 version have been found.
Author
Dr. Heikki Saha
TK Engineering Oy
heikki.saha@tke.fi
[1] Sitte A., Weber J., Structural design of independent metering control systems, The 13th Scandinavian International Conference on Fluid Power, SICFP2013, June 3-5, 2013, Linköping, Sweden
[2] Rath G., and Zaev E., Cylinder Pressures in a Position Controlled System With Separate Meter-in and Meter-out, The 13th Scandinavian International Conference on Fluid Power, SICFP2013, June 3-5, 2013, Linköping, Sweden
[3] Kolks G., Weber J., Getrennte steuerkanten für den einsatz in stationärhydraulischen antrieben, O+P Fluidtechnik, 6/2018, pp. 42-51
[4] Heybroek K., On Energy Efficient Mobile Hydraulic Systems, Linköping Studies in Science and Technology, Dissertations, No. 1857, 103 p.
[5] Profile Fluid Power Technology, Proportional Valves and Hydrostatic Transmissions, Version 1.6.2, Verband Deutscher Maschinen und Anlagenbau e.V., 2010, 121 p.
[6] Device profile for fluid power technology proportional valves and hydrostatic transmissions, Version: 1.5.3, 2012, CAN in Automation (CiA) e. V.
[7] Saha H., MMC 2015 CAN in Automation Improved management of CANopen-based distributed control systems, Proceedings of the 2:nd MMC, CAN in Automation (CiA) e. V., 2015
[8] Saha H., Accelerated transfer of CANopen projects into assembly and service, CAN-newsletter 4/2012, CAN in Automation (CiA) e. V., pp. 16-20
[9] Saha H., CANopen in series production, CAN-newsletter 3/2015, CAN in Automation (CiA) e. V., pp. 8-11
[10] John K-H., Tiegelkamp M., IEC 61131-3: Programming Industrial Automation Systems, Springer Verlag, 1995, ISBN 3-540-67752-6

